|
|
Parma Project
Project Overview
– Funding Agency: European Commission – Funding Type: Special Target Research Project (STREP) – Project Title: Performance Advances in Recording through Micro Actuation (PARMA) – Starting date: 01-Oct-2006 – Project Duration: 3 years – Consortium members: 4 – Research funding: 1,825,000 &euro
SLIM - Slider with Integrated Microactuator
Properties of SLIM
– Dimensions corresponding to the dimensions of a pico slider – SLIM slider consisting of a bottom magnetic wafer (with two microactuators) and a top micromechanics wafer bonded by a spacer – Read/write element attached to the chiplet
Key Benefits of SLIM
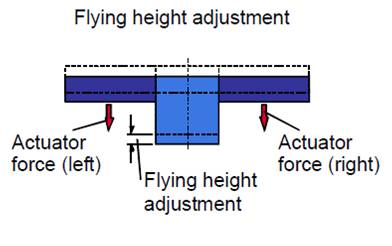
– Superior to presently known approaches – Promises lower costs for slider plus read/write element than for a present day slider – Allows to dynamically adjusting the flying height – Allows for a second stage actuation for track following
Second Stage Track Following
– Two microactuators integrated • Even excitation: Platform lowers • Opposite excitation: Platform swivels – Lateral displacement (fine tracking): ±5 tracks at 20 ktpi (±635 nm) – Maximal rotation for ±635 nm track following: ±0.18° – Resulting height change: < 2 nm
Second Stage Track Following (cont`d)
– Simulation results: • Lowest resonance frequency for flying height adjustment: 1.2 kHz • Lowest resonance frequency for track following: 5.6 kHz
Challenge
– Increasing the recording density of Hard Disc Drives (HDD) causing a decrease of: • Distances between flux reversals • Width of the magnetic data tracks • Flying height – Voice coil actuator running into limitations with regard to track following – Changes in flying height during track-seeking motions causing signal loss and risk of head-to-disk contact – Integration of an electromagnetic actuator into the slider – Using a chiplet with the read/write element attached to the integrated actuator – Using a Slider with Integrated Microactuator (SLIM) |